A Robotic Sensory System with High Spatiotemporal Resolution for Texture Recognition 用于纹理识别的高时空分辨率机器人感觉系统
Abstract 摘要
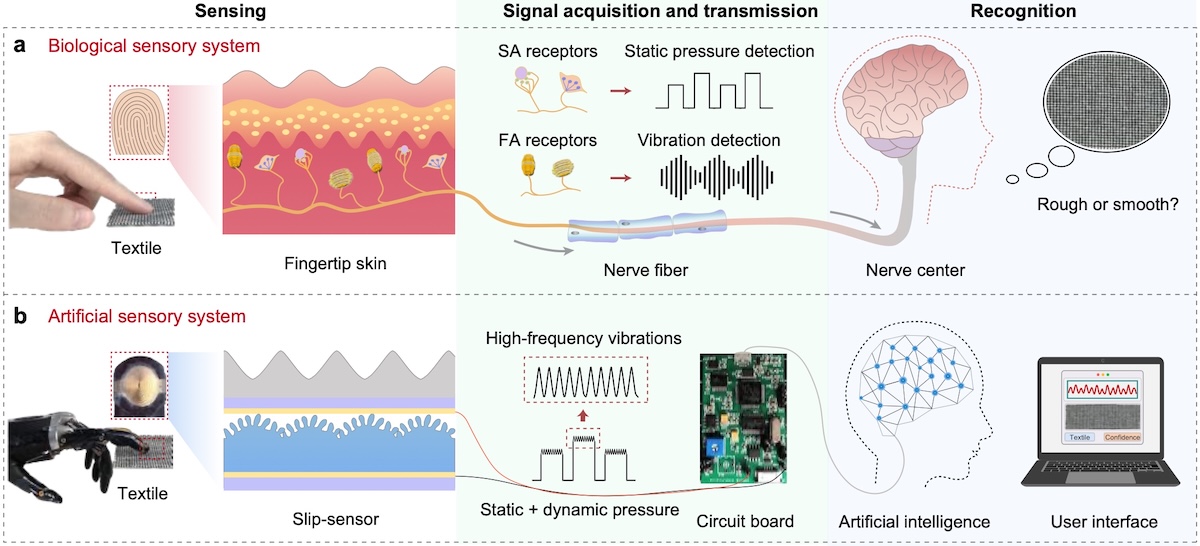
Humans can gently slide a finger on the surface of an object and identify it by capturing both static pressure and high-frequency vibrations. Although modern robots integrated with flexible sensors can precisely detect pressure, shear force, and strain, they still perform insufficiently or require multi-sensors to respond to both static and high-frequency physical stimuli during interaction. Here, we report a real-time artificial sensory system for high-accuracy texture recognition based on a single iontronic slip-sensor, and propose a criterion, spatiotemporal resolution, to correlate the sensing performance with recognition capability. The sensor can respond to both static and dynamic stimuli (0-400 Hz) with a high spatial resolution of 15 μm in spacing and 6 μm in height, together with a high-frequency resolution of 0.02 Hz at 400 Hz, enabling high-precision discrimination of fine surface features. The sensory system integrated on a prosthetic fingertip can identify 20 different commercial textiles with 100.0% accuracy at a fixed sliding rate and 98.9% accuracy at random sliding rates. The system demonstrates a route toward tactile sensing for robotics and prosthetics, with potential relevance to haptic-based virtual reality.
人类能够通过手指轻触并滑过物体表面,同时捕获静态压力和高频振动信息,从而辨别材料纹理。尽管现代机器人结合柔性传感器后已经能够精确测量压力、剪切力和应变,但在同时响应静态与高频刺激时,现有方案往往表现不足,或需要多个传感器协同工作。本文提出了一种基于单个离子电子滑移传感器的实时人工感觉系统,用于高精度纹理识别,并引入“时空分辨率”这一指标来关联感知性能与识别能力。该传感器可在 0–400 Hz 范围内同时响应静态和动态刺激,具备 15 μm 间距、6 μm 高度的高空间分辨率,以及在 400 Hz 处 0.02 Hz 的高频分辨率,因此能够精确区分细微表面纹理。集成于仿生指尖后,该系统在固定滑动速度下可对 20 种商业织物实现 100.0% 的识别准确率,在随机滑动速度下也达到 98.9%。该系统展示了一条面向机器人与假肢触觉感知的实现路径,并与基于触觉的虚拟现实等应用方向相关。
Video 视频
A portable and real-time sensory system for texture recognition. 一个便携式、实时的纹理识别感觉系统。
A portable real-time system using a prosthetic hand equipped with a slip-sensor. 一个基于带滑移传感器仿生手的便携式实时系统。
Recommended citation. 推荐引用。 Bai, N.*, Xue, Y.*, Chen, S., Shi, L., Shi, J., Zhang, Y., ... & Guo, C. F. (2023). A robotic sensory system with high spatiotemporal resolution for texture recognition. Nature Communications, 14(1), 7121.